
0 ����
������݆�C�ǟ����l늏S����Ҫ�����D�O�䣬���ڰ�ȫ�������\�е���Ҫ����݆�C���D�ٕr�̶�Ҫ̎�ڿɿصķ���֮�ȣ���ˣ�����݆�C�lչ�ĸ����A�Σ������ٹ��ܶ��ǘO����Ҫ����݆�C���������W�\�����g�l�����ٵĿ������^С��һ���l���ⲿ늾W���ϡ���əC�M����˦ؓ�ɻ���ԇ��̖������əC�M����˦ؓ�ɵ���r����݆�C�Ƿ��٣�ȡ�Q�����ٹ����Ƿ��OӋ�����c�Ƿ����_���С�
ʹ��݆�C�D�ٕr�̶�̎�ڿɿط���֮�ȣ��nj���݆�C�����Һ�{������ϵ�y�����Q��DEH��ϵ�y���������Ҫ����˱���DEH���a��ᘌ���ͬ��ʽ����݆�C�OӋ�������ķ����ٹ��ܣ�����ȡ�������õ�Ч��[1]��ᘌ���Ͷ�a���{��ϵ�y���ش�������݆�C���ԣ�ͨ�^˦ؓ��ԇ��z���ӑB�{�������Ƿ�ϸ�������ٹ����Ƿ�ɿ�����һ���֮��Ч�Ĵ�ʩ[2]�����ȶ��_�C�M��˦ؓ��ԇ�r���F��݆�C�D��˲�g�^���w���Ć��}���º������������ٹ���ʧЧ���¡�
1 ������݆�C�ķ����ٹ���
�V�x���v��һ��������������݆�C�D���w���Ĵ�ʩ�����Կ�����݆�C�����ٹ��ܣ�����ǰ����������݆�C˦ؓ��˲�g�D��������ʧ���w�����˕r�ķ����ٹ��ܾ��@��������Ҫ����˱���������ӑՓ����݆�C�����ٹ��ܣ�Ҳ����ָ˦ؓ��˲�g��݆�C���D���w�����ƹ��ܡ�Ŀǰ������������݆�C����ϵ�y�У���݆�C�����ٹ��ܵ��OӋ��Ҫ��˦ؓ���A�y��load drop anticipation�����Q��LDA�������ܡ�����-ؓ�ɲ�ƽ��(power-load imbalance�����Q��PLU���������Լ�ؓ��˲�r�Д���ƣ�KU�����L˦ؓ�ɣ�LAW�����ܡ���Ŀǰ����������݆�C�S���|���������c������300MW��������������݆�C����DEH�����|���C�M�����PLU���ܣ������c�����C�M�����LDA���ܣ������Ͷ�a������-���T���ͳ����R����݆�C�����KU�cLDA���ܡ�
2 LDA���ܼ���ʧЧ����
2.1 ���͵�LDA�����OӋ
LDA����һ�������݆�C���ٿ���(overspeed protection control,���Q��OPC��)����ԇOPC���܄����r�� OPC늴��yʧ늄�������݆�C�����{���y�����P�]���ڴ˻��A�ϣ����͵�LDA�����OӋ�����ɂ���ʩͬ�rʹ�ã�
��1���C�M����˲�g������˕r���и�������������30%�~��ֵ�r��OPC����2�룬�߉��{���y���Љ��{���yͬ�r�P�]���߉��{���y����݆�C�D�ٽ����~���D�ٺ����r�_�����Љ��{���y���״�OPC���������ӕr2����_�������������ĕr�g�����M�Ѓ���[3]��
��2���D�ٳ��^103%�~���D�ٕr��OPC�������D�ٽ���102%�~���D�����r��OPC�֏ͣ���˿��ܷ��Ͷ�Σ���Kʹ��݆�C�S�����~���D�١�
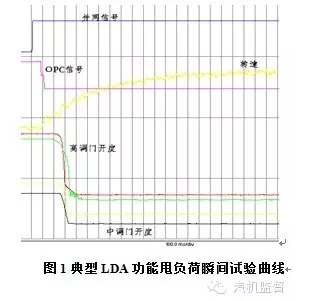
�D1�����LDA������݆�C�ĵ���˦ؓ��ԇ�������˦ؓ��˲�g�^�̴��¿������飺���W��̖��ʧ���D���w����10ms��50ms��OPC���܄��������^�s50ms��ߡ��Љ��{���y�_ʼ���P���@һ�^�����_���У��ɻ������C˦ؓ�ɺ���݆�C�����١�
2.2 LDA����ʧЧ����
ij����N600-16.7/537/537����݆�C�������Ϻ����ADEH-IIIA�͔���ʽ�Һ�{������ϵ�y��ʹ��LDA���܁�����˦ؓ�ɺ���D���w������50%˦ؓ�ɕr���D���w����3151r/min���cͬC��������@ƫ��[4]���D2��˦50%ؓ��˲�g�^��������
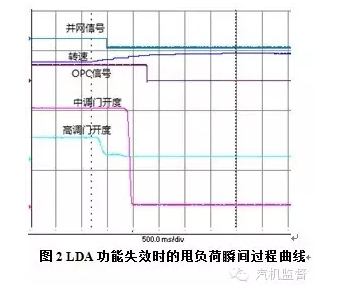
�º�������������������ԭ��飺�W��̖̓�ӣ�����LDA�����д�ʩ1δ���OӋҪ�������˦ؓ��˲�g���ߡ��Љ��{���yδ�������P����������݆�C�D��������103%�~���D�ٕr��OPC�ń������{�T���P���������´��������M����݆�C�����˦ؓ�ɺ��w���D��ƫ�ߡ�
�����J�飬�D2����݆�C�D���_ʼ�w�����ӕr�s110ms���{�T�_ʼ�P�]����DEH���D�ٿ��ƻ�·���õĽY�������⣬һ��OPC���܄����r��ͬ�r���OӋ�Ќ��{���y�_��ָ����Þ�0�Ŀ���߉��ͨ�^�ŷ��y���P�]���{���y�����������������M��100%˦ؓ��ԇ�D�����ֵ��3158r/min��������������
�o����ż��ij����600MW��݆�C���M��50%ؓ��ԇ�r���D������w����3280 r/min���º������˦ؓ��ԇ��^���У�ԓ��݆�COPC���ܛ]�Є�����LDA������ȫʧЧ��˦ؓ�ɺ���D��ֻͨ�^�D�ٻ�·���{���������D���w���^�ߡ�
���σɂ������f���� DEH�D���{����·������˦ؓ�ɺ���݆�C�D���w��������һ�����ã��������Ա��C��݆�C�����٣�LDA�������_�������Դ_��˦ؓ�ɺ���݆�C���D���w���������S������ �ʴ_�Д�����ٹ����|�l�r�C���������_���е�ǰ��l����
3 PLU���ܼ���ʧЧ����
3.1 ���͵�PLU�����OӋ
PLU�����Ǹ���˲�g����׃�����Д��C�M�Ƿ�˦ؓ�ɣ���ͨ�^���P�����{���y�팍�F����݆�C˦ؓ�ɺ��ٵ����ƣ������ږ|�����M����ϵ����݆�C�ϑ��öࡣPLU����һ���c���ٶ����ƣ�ACC���������ʹ�ã�����ͬ������݆�C��˦ؓ�ɕr�D���w���������OӋ���£�
��1��PLU���ܣ��ٟ������ډ����c�l늙C���֮�g��ƫ��^�O��ֵ���Ұl늙C����Ĝp�ٳ��^40%/10ms�r�����ʣ�ؓ�ɲ�ƽ���^���������Ѹ���P�]��݆�C�����{���y3�룬������݆�C�ij��١�һ�Εr�g���Љ��{���y�֏����ŷ��y���ƣ�����K�S����݆�C���~���D�١�
��2��ACC���ܣ�����݆�C�D�ٴ���3060 r/min�����ٶȴ���49(r/min)/s�r�����ٶ��^�����ACC RELAY�������������P�]�Љ��{���y2.5�룬�Ķ�������݆�C���D���w����
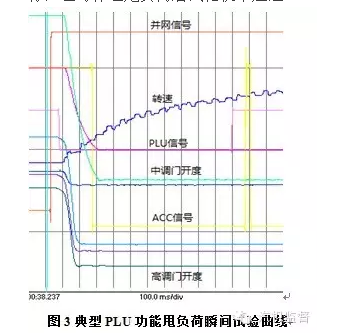
�D3�����PLU������݆�C�ĵ���˦ؓ��ԇ�������˦ؓ��˲�g�^�̴��¿������飺���W��̖��ʧ���D���w�����s30ms��50ms��PLU���܄������ߡ��Љ��{���y���P���@һ�^�����_���У�Ҳ�ɱ��C˦ؓ�ɺ���݆�C�����١�
3.2 PLU����ʧЧ����
ij�|��N600-24.2/566/566����݆�C�������ձ�����HIACS-5000M��DEHϵ�y������PLU���܁�����˦ؓ�ɺ���D���w������50%˦ؓ�ɕr���D���w����3237r/min�����@ƫ�ߣ��D4��˦50%ؓ��˲�g�^��������
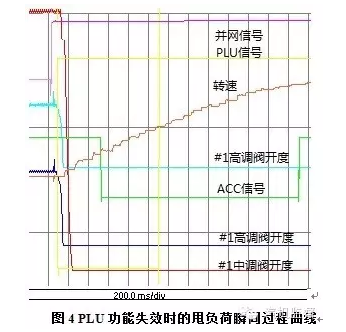
�º�������������������ԭ��飺��#2�Љ��{���y���P늴��y�͵��Դ���^Ó�䣬˦ؓ��ԇ�r�]�п��P��˦ؓ�ɕr��ӛ��������D4�����ɛ]�Ќ�#2���{�T���룬���º�����ԭ���M�з���ԇ�r�l�F���@һ���}�����}��Q�������M��50%˦ؓ��ԇ����D��3079r/min���M��100%˦ؓ��ԇ����D��3192r/min����������������
���H�ϣ���ƵęC�M���M��˦ؓ��ԇ�r���Љ��{���y�o�������P�]�İ���Ҳ�l���^��һ�_�ձ��|֥��˾���������a��600MW���R����݆�C��DEH������M��100%˦ؓ��ԇ�r�����ٱ��o����������D�ٵ�3405r/min[5]���º�����������҃ȉ���ͻ�������Љ��{���y���P�^���д����_�ȷ������Ķ�ʹ����݆�C˦ؓ�ɺ��D���w���^�ߡ�
���ϰ�������f������݆�C˦ؓ��ԇ�Ҫ����Ҏ��Ҫ��ּ��M�У�100%˦ؓ��ԇ�����50%˦ؓ��ԇ�Y���ϸ���M�У�˦ؓ��ԇ�r�����������{���y���_����̖�������ӛ䛃x���{���y�Ŀ��ٿɿ��P�]�Ƿ����ٹ��������l�]���õ���Ҫ���C��
4 KU��LAW���ܼ���ʧЧ����
4.1 ���͵�KU��LAW�����OӋ
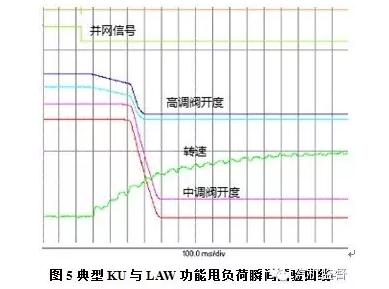
Ŀǰ���Ϻ���݆�C�S���M�����T�ӳ����R����݆�Cһ�����KU�cLAW���܁���Ɍ��C�M˦ؓ�ɺ���D���w�����ƣ�DEHϵ�y����������̖��׃���Д��Ƿ�l��KU��LAW��̖�������OӋ�����ɷN��r�£�ϵ�y���l��KU��̖[6]��
��1����ǰؓ�ɞ��^��ؓ�ɣ��磺90%�~��ؓ�ɣ��r�����ͻȻ���Fؓ�ɸɔ_����ؓ����׃��ֵGPLSP���s70%�~��ؓ�ɣ���
��2����ǰؓ�ɞ��^��ؓ�ɣ��磺60%�~��ؓ�ɣ��r���t���l����ͬ�r�M�㣺
a�����Hؓ��С��2���S��늣�
b��ؓ�ɿ���ƫ�����2���S��늣�
c�����Hؓ�ɴ���ؓ��ؓ����ֵ��
�C�M��ؓ���\�Еr������l��˲�rؓ���Д࣬�tؓ���Д���̖KU���͵��D��ؓ���{��ģ����ʹ�{�����T�PС�������ؓ�ɸɔ_�R�e�r�g��һ���2s���ȣ������ɷN��r��ʧ���ص�������B���tϵ�y�����l��˦ؓ����̖��LAW����������σɷN��r�^�m���ڣ��t�l��˦ؓ����̖����׃�D��ؓ���{��ģ���Ĺ�����B��ʹĿ���D���O��ֵ���ӕr�D���O��ֵ�S�����~���D�١�
�D5�����KU�cLAW������݆�C�ĵ���˦ؓ��ԇ��������Ķ��_�C�M��ԇ���r����DEH�е�KU��̖�cLAW��̖�o�����딵��ӛ䛃x��ԇ��^��δ��ӛ䛵��@�ɂ���̖��KU�cLAW���܄�����r�ɏĸߡ��Љ��{���y������r�Ɯy���˕r��˦ؓ��˲�g�^�̴��¿������飺���W��̖��ʧ���D���w�����s30ms��50ms���{���y�_ʼ�pС��KU���܄������s100ms��200ms�ߡ��Љ��{���y���P��
4.2 KU����ʧЧ����
ij����-���T��660MW�����R����݆�C��DEHϵ�y���� Ovation��˾�O�䣬ʹ��KU�cLAW���܁�����˦ؓ�ɺ���D���w������50%˦ؓ�ɕr���D���w����3126r/min�����@ƫ�ߣ��D6��ԓ�C�M˦50%ؓ��˲�g�^��������
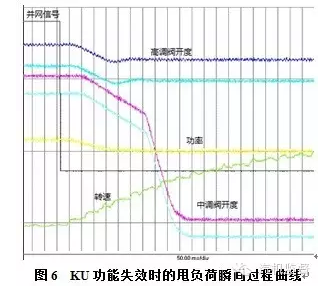
�º����������D���w��ƫ��ԭ��飺˦ؓ�ɺ߉��{���y�]�а��OӋҪ����P��ͨ�^�鿴DEH�vʷӛ䛰l�F���߉��{���y���P늴��y�]�н��յ����Pָ���ԭ���ǣ�KU�����|�l�����{�y����ָ������Сֵ�����{�y��������ָ���c����ƫ�����40%�r�|�l���P���@���l����50%˦ؓ��ԇ�r�]�НM�㣬��ͬ��͙C�Mԓֵһ���O�Þ�25%����̎�O�Þ�40%���@ƫ��ԓֵ�Ğ�25%���M��100%˦ؓ��ԇ�D����ߞ�3191 r/min���cͬ��͙C�M����һ�¡�
��һ�_ͬ��͙C�M50%˦ؓ��ԇ�D�����ֵ��3098r/min����������������100%˦ؓ��ԇ�r���D�����ֵ��3320r/min����݆�C���ٱ��o����[7]���º������ԓ�C�MDEH���{���y���P�|�l߉퓒�������ģʽ�����٣�̎����ؓ���ʺ;W�jͨӍ�ٶȵ��S�C�ԣ�ʹ�ÿ��Pָ��l����늴��y�����r�g��80ms��850ms�g�S�C׃�����Ķ�����50%˦ؓ��ԇ�Y����������100%˦ؓ��ԇ�ʧ����ԓ�C�M̎�������飺���Ӳ��W��̖��ʧ�����Љ��{���y���l늴��yʧ�1��߉���������Pվ�gͨӍ�c�Ē����l�������ٸĞ���٣����ĺ��Μyԇ���Y��������
���ϰ�������f������݆�C�����ٹ������P��ֵ��Ҫ���أ���Ҫ�M���ģ����M�б�Ҫ�Ĝyԇ���Դ_���IJ���Ӱ푷����ٹ��������l�]���á�
5 �YՓ
���Ƚ�����mδ�l��������݆�C�����¹ʣ����D��˲�gʧ���w������r�ԕr�аl������ȫ�[�����ݺ�ҕ����DEH����ϵ�y�������ͺ���݆�CҺ���{��ϵ�y��������ٹ���߉��ֵ�ĺ�˦ؓ��ǰ�o�B����ԇ�δ�M�е���r���M��˦ؓ��ԇ�����ٹ���ʧЧ�¼���l����ˣ������،���DEHϵ�y�����c��ֵ�Ĺ�������˦ؓ��ԇ�֮ǰ��ͨ�^�o�Bԇ�����ٹ����M�Йz�顣
��һ�_��݆�C���ԣ��������C�����c���������N���͵ķ����ٹ������x��һ�N���ɣ��������÷����������`�ӵĿ��ܣ�����C�M������ע���@һ���}����˦ؓ��˲�g���ԣ����LDA��PLU�Լ�KU�ȷ����ٹ��ܹ����Д����_��������푑�Ѹ�١�߉���е�λ����݆�C�y�T���P���������������^�o�B����ԇ���C�������ɱ��C˦ؓ�ɕr��݆�C�����l�������¹ʡ�
�����īI
[1] ���S.�҇�600MW�ȼ���݆�C˦ؓ��ԇ�F�����[J].��݆�C���g,2010,52 (3):221-224.
[2] DL1270-2013,�����l늽��O���̙C�M˦ؓ��ԇ�t[S].����:�Ї����������,2014.
[3] ����.���ø߉��׆��ӷ�ʽ�C�MOPC����ԇ��о�[J].�����l�, 2013,42(9):81-86.
[4] ����,�����,��ȫ�x.˦ؓ���A�y����ʧЧ�r��˦ؓ��ԇ�[J].��݆�C���g, 2006,48(2):124-126.
[5] ͯС��,����,���W��,��. ��݆�C�ٟ��{���y���P�^�̮���������̎�� [J].�����l�, 2009,48 (11):53-56.
[6] �����.1000MW��݆�C�M˦ؓ��ԇ����[J].�A�|���,2007,35(6):32-34.
[7] ���W��.ij�����R��660MWȼú�C�MFCBԇ�ɹ�ԭ����������M[J].�A�|���,2014 ,42 (7):1503-1505.

�c�����㣺�w�����ڣ�������һ�����֣��������^��������һ�����֡�





 �鿴�Y��
�鿴�Y��
 �ղ�
�ղ� �
�  ��
�� 


