ȼú�C(j��)�M�L(f��ng)��ϵ�y(t��ng)���Ɯ\Մ
���ܼ��d늏S�O(sh��)�䲿DCS�M ������
[ժ Ҫ] ȼú�C(j��)�M���L(f��ng)��ϵ�y(t��ng)��偠t���ֵ���Ҫ�M�ɲ��֣����а���һ���L(f��ng)�������L(f��ng)�͠t��ؓ(f��)���Ŀ��ƣ��@Щ�h(hu��n)��(ji��)���ƵĺÉ�ֱ��Ӱ����C(j��)�M�\(y��n)�еĽ�(j��ng)��(j��)�ԺͰ�ȫ�ԣ�������Ҫ�Ԡt��ؓ(f��)�����Ʋ��Ԟ�����B���е����P(gu��n)���ƻ�·��
[�P(gu��n)�I�~] �L(f��ng)��ϵ�y(t��ng) �t��ؓ(f��)�� ���Ʋ���
һ�� �����O(sh��)��(ϵ�y(t��ng))����
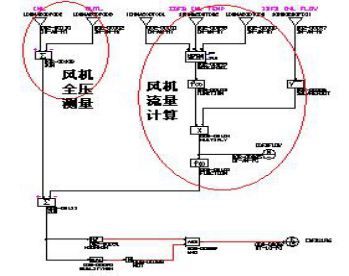
�t��ؓ(f��)������ϵ�y(t��ng)�����w�ķ�����Ҫ�������_(t��i)���L(f��ng)�C(j��)������(g��)�t�ʼn����y(c��)�c(di��n)��
���L(f��ng)�C(j��)�����P(gu��n)�y(c��)�c(di��n)�IJ���ʾ����D1-1����ʾ��
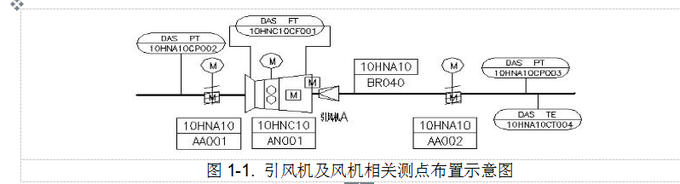
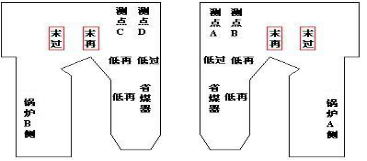
ij늏S�Ġt�ʼn���ģ�M���y(c��)�c(di��n)һ����4��(g��)������3��(g��)�y(c��)�c(di��n)��С���̜y(c��)�c(di��n)�������x�Kݔ�������ڠt��ؓ(f��)���Ŀ���(�y(c��)�c(di��n)A~C)��1��(g��)������̜y(c��)�c(di��n)��������r�µ�ؓ(f��)���^���ӛ�(�y(c��)�c(di��n)D)�����ڠt���еIJ���λ����D1-2����ʾ��
���� ���ƹ����f��
�t��ؓ(f��)������ϵ�y(t��ng)��Ҫ��ͨ�^��׃���L(f��ng)�C(j��)�o�~���{(di��o)��(ji��)���L(f��ng)�C(j��)�������Ķ���ɠt�ʼn����Ŀ����^�̡�ԓ���ư�����MFT���Y���o(h��)��·��RB���rƽ���·���L(f��ng)�C(j��)����^(q��)���]�i���o(h��)��·���L(f��ng)�C(j��)��ƽ���·����ĥ��·��PID�{(di��o)��(ji��)���ƻ�·��
���� ߉���a��B
1�� MFT���Y��·
��(d��ng)MFT���r�l(f��)�������ڠt���е�ú�ۺ�ȼ�͵�ȼ��ȫ�����Д࣬��(d��o)� t�Ń�(n��i)���������͠t��(n��i)�ضȼ����½����t�ʼn��������½����@�r(sh��)��Ҫ�����P(gu��n)С���L(f��ng)�C(j��)�o�~����Ȼ������ɠt�ű���׃�εȇ�(y��n)�غ����Ӱ��O(sh��)��İ�ȫ�ԡ�
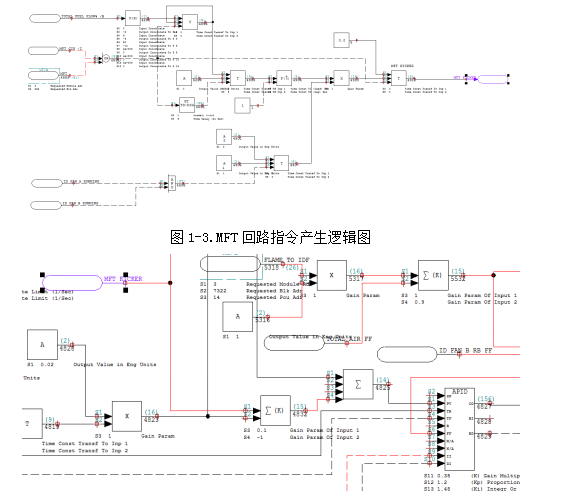
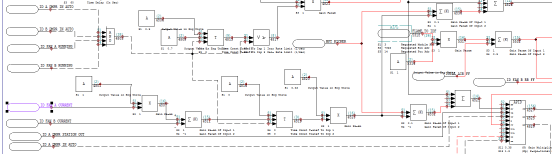
MFT���Y��·��߉��D1-3/1-4��ʾ����4̖(h��o)�C(j��)�M��������ԓ��·�������ǣ���MFT�l(f��)����ԓ��·���a(ch��n)���Ġt��ؓ(f��)��ƫ�ïB�ӵ����L(f��ng)�C(j��)�o�~��PID��ȥ��ԓָ�����(j��)�l(f��)��MFTǰ���L(f��ng)���Ĵ�С�����L(f��ng)�C(j��)�\(y��n)�е��_(t��i)��(sh��)�Q��������ԓָ������ٷ��Ȟ�0.5/s��
2�� RBƽ���·
�@���RB���r��ָ�������L(f��ng)�C(j��)RB����(d��ng)�l(f��)�������L(f��ng)�C(j��)RB�r(sh��)��δ���l��һ�_(t��i)���L(f��ng)�C(j��)ҪѸ�ٴ��_��ȫ�_��λ�ã���ƽ����һ��(c��)�L(f��ng)�C(j��)���l�����Ĕ_��(d��ng)��ԓƽ���^����ͨ�^ABB����ϵ�y(t��ng)�е��ГQ�K��(sh��)�F(xi��n)��һ�_(t��i)���L(f��ng)�C(j��)���l�r(sh��)��ԓ�L(f��ng)�C(j��)���lǰָ���50%�B�ӵ������\(y��n)�е����L(f��ng)�C(j��)��ȥ��ԓָ���3%/s���ٶ�׃������D1-5��ʾ���Դ�ͬ�r(sh��)�����]�����L(f��ng)�C(j��)�İ�ȫ�\(y��n)�У����ܳ��������������L(f��ng)�C(j��)ָ��ݔ�����O(sh��)�������ޣ���������(j��)���L(f��ng)�C(j��)��������ԇ�(y��n)�õ���һ���������90%���ң�
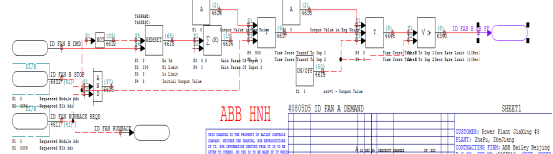
�D1-5 ���L(f��ng)�C(j��)RB���D(zhu��n)��·
3�� �L(f��ng)�C(j��)����^(q��)���]�i���o(h��)��·
����(j��)���L(f��ng)�C(j��)�Ĺ��������������õ�����(d��ng)�����������������L(f��ng)�C(j��)�ڲ���(w��n)���^(q��)���(n��i)�\(y��n)�У��ҹ�·ϵ�y(t��ng)�е�����������(du��)�^��r(sh��)���t�L(f��ng)�C(j��)�����������^���S���ʕ�(hu��)��˲�g��(n��i)�l(f��)���ܴ�������Բ���(d��ng)���������ҵ����(d��ng)������ԓ�F(xi��n)�Q֮�鴭��F(xi��n)��·���o(h��)��Щ늏S��(hu��)�O(sh��)�ã���Щ�t�]�С���D1-6��ʾ��
�D1-6 �L(f��ng)�C(j��)����^(q��)���]�i���o(h��)
4���L(f��ng)�C(j��)��ƽ���·
��(d��ng)���_(t��i)���L(f��ng)�C(j��)��Ͷ���Ԅ�(d��ng)�������L(f��ng)�����L(f��ng)�C(j��)�������Ե�ԭ���_(t��i)�L(f��ng)�C(j��)����ͬ��ָ���£���(hu��)���F(xi��n)������һ�µ���r���Ķ�ʹ�Ãɂ�(c��)�L(f��ng)��ؓ(f��)�d��ͬ���@�ͳ��F(xi��n)��ƽ����_(t��i)�L(f��ng)�C(j��)������ƽ���·߉�����а��������T�ք�(d��ng)ݔ���ƫ�û�·���L(f��ng)�C(j��)����ƽ���·��
�L(f��ng)�C(j��)��ƽ���·���������L(f��ng)�C(j��)��������L(f��ng)�C(j��)�ij����Г�(j��)��ͨ�^�����Ԅ�(d��ng)����ؓ(f��)���O(sh��)��ƫ���ԕr(sh��)�̱����L(f��ng)�C(j��)֮�g�ij���ƽ�⣬�D1-7�������L(f��ng)�C(j��)��ƽ���·���˻�·���ڃ��_(t��i)���L(f��ng)�C(j��)���\(y��n)���ғ�����ƾ����Ԅ�(d��ng)����r�������ã�
�D1-7���L(f��ng)�C(j��)��ƽ���·
5����ĥǰ����·
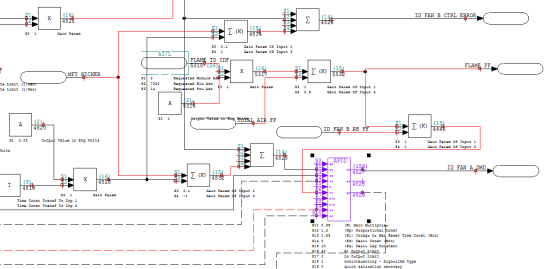
ԓ��·��MFT���Y��·������֮̎���Ʒ�ϵ�y(t��ng)���l��Ҳ����ɠt�Ń�(n��i)�L(f��ng)���͠t��(n��i)�ض��½����t��ؓ(f��)�������½�����ֹ���L(f��ng)�C(j��)������PID��·�o�������{(di��o)��(ji��)���O(sh��)���Ŀ���߉����(d��ng)�l(f��)���Ʒ�ϵ�y(t��ng)���l�r(sh��)������(j��)���l���_(t��i)��(sh��)����(y��ng)�ĜpС���L(f��ng)�C(j��)�{(di��o)��(ji��)����ָ���ÿ��һ�_(t��i)�pС���L(f��ng)�C(j��)0.8%ָ��Ӌ(j��)�㣻
6��PID�{(di��o)��(ji��)��·
���L(f��ng)�C(j��)��PID�{(di��o)��(ji��)���ƻ�·��(du��)�t�ʼn������O(sh��)��ֵƫ���M(j��n)�п��ƣ���Щ���Ʋ�������ԓ��·���õĿ�������׃����(sh��)PID���ܸ���(j��)��ͬؓ(f��)�Ɍ�(du��)PID�������ı����e�օ���(sh��)�M(j��n)���ġ�ͨ�^�D1-8��ʾ�����]���t�ʼn������}��(d��ng)�ԣ�ԓ��·��(du��)�t�ʼn����y(c��)�c(di��n)�M(j��n)���˞V��̎��������AAB����ϵ�y(t��ng)�Ĝ����܉K��PID���ƻ�·߀������һ��(g��)���L(f��ng)��ǰ����ԓǰ����ӳ���L(f��ng)����׃�������������L(f��ng)�C(j��)����ǰ푑�(y��ng)��
�D1-8 ���L(f��ng)�C(j��)PID�{(di��o)��(ji��)��·
�ġ����Y(ji��)
ȼú�C(j��)�M偠t���ֿ������L(f��ng)��ϵ�y(t��ng)��һ��(g��)����Ҫ�ĭh(hu��n)��(ji��)��ԓϵ�y(t��ng)���Ԅ�(d��ng)�{(di��o)��(ji��)Ʒ�|(zh��)�É��P(gu��n)ϵ���C(j��)�M�\(y��n)�еĽ�(j��ng)��(j��)���c��ȫ�ԣ�偠t��(c��)���Ԅ�(d��ng)�{(di��o)��(ji��)�m�]�����C(j��)��(c��)��ô����(x��)���������ı����������������^��IJ���(d��ng)���c�����ԣ��Ԅ�(d��ng)�����y�ȱ��^����Ҫ�˽ⱻ�����ڲ�ͬ�Ĺ��r�£�����һЩ�O����r�µ��{(di��o)��(ji��)̎�����@����Ҫ�ڿ���߉�зŴ�����ǰ���A(y��)�л�·��ֻ�Ќ��@Щǰ����·�˽������������������λ�����܌�������������һ��(g��)������(w��n)���ķ�����(n��i)�����C�C(j��)�M�\(y��n)�н�(j��ng)��(j��)��ȫ��




 �鿴�Y��
�鿴�Y�� �ղ�
�ղ� �
�  ��
�� ���@��o�Ұl(f��)��Ϣ")


